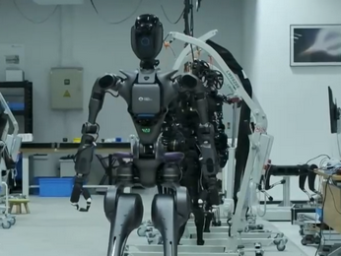
“成都造”人形机器人能够实现全自主跨空间作业是一项非常了不起的成果。
一、技术突破方面
1. 自主导航与环境感知
在全自主跨空间作业中,机器人首先需要具备精准的环境感知能力。它可能配备了多种传感器,如激光雷达、摄像头、深度传感器等。通过这些传感器收集周围环境的信息,像激光雷达可以构建出环境的三维点云图,摄像头则能识别出物体的形状、颜色和纹理等特征。
在导航算法方面,利用这些传感器数据,机器人可以规划出从一个空间到另一个空间的最优路径。例如,采用基于地图的路径规划算法,根据预先构建的地图或者实时构建的地图,避开障碍物,准确地到达目标位置。
2. 操作任务规划与执行
对于作业任务,人形机器人需要理解任务的目标和要求。这涉及到复杂的任务规划系统,它能够将大的任务分解成一系列的子任务。比如在跨空间搬运物品的任务中,机器人要先确定目标物品的位置,规划抓取的动作,再规划如何将物品搬运到指定的另一个空间的目标位置。
在执行任务时,人形机器人的关节控制精度非常关键。它需要精确地控制各个关节的运动,以实现稳定的抓取、搬运等动作。这可能依赖于先进的电机驱动技术和精密的关节结构设计,确保机器人在操作过程中能够灵活、准确地完成任务。
二、应用前景方面
1. 工业制造领域
在工厂车间里,这种人形机器人可以在不同的生产区域之间自主移动,进行物料搬运、零部件装配等工作。例如在汽车制造车间,它可以从仓库区域搬运零部件到装配线上,实现全自动化的物流和装配流程的衔接,提高生产效率,减少人力成本。
2. 危险环境作业
在一些危险环境,如核电站、火灾现场等,人形机器人可以代替人类进入进行检测、救援等任务。在核电站中,它可以在不同的辐射区域之间穿梭,检查设备的运行状况,而不需要人类暴露在高辐射环境下;在火灾现场,它可以进入浓烟滚滚的建筑物内,搜索幸存者并传递现场信息给救援人员。
3. 服务行业
在大型商场、酒店等场所,人形机器人可以自主在不同楼层、不同区域之间移动,为顾客提供引导、送物等服务。比如在酒店里,它可以将客人点的餐食或用品从厨房或仓库送到客人的房间,提升服务体验。
|
|

 |手机版|标签|新闻移动网xml|新闻移动网txt|全球新闻资讯汇聚于 - 新闻移动网
( 粤ICP备2024355322号-1|
|手机版|标签|新闻移动网xml|新闻移动网txt|全球新闻资讯汇聚于 - 新闻移动网
( 粤ICP备2024355322号-1|